| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 |
- Trie
- Hash
- String
- Brute Force
- union find
- 스토어드 프로시저
- 다익스트라
- Two Points
- MYSQL
- 이진탐색
- SQL
- 그래프
- binary search
- two pointer
- DP
- Stored Procedure
- Dijkstra
- Today
- Total
codingfarm
2. 선형 시불변 시스템(LTI system) - 연속시간 LTI 시스템 : 컨볼루션 적분(Convolution Integral) 본문
2. 선형 시불변 시스템(LTI system) - 연속시간 LTI 시스템 : 컨볼루션 적분(Convolution Integral)
scarecrow1992 2020. 4. 19. 16:52앞절에서는 이산시간 LTI 시스템의 컨볼루션 합에 대해 다루었다.
이번절에서는 연속시간 LTI 시스템의 컨볼루션 적분에 대해 알아보겠다.
2-1. 임펄스를 이용한 연속시간 신호의 표현
(The Representation of Continuous-Time Signals In Terms of Impulses)
연속시간 임펄트 함수의 일차결합을 통해 임의의 함수를 표현할 수 있다.
$$x(t)=\int_{-\infty}^{+\infty}x(\tau)\delta(t-\tau)d\tau$$
위 식을 연속시간 임펄스의 선별특성(sifting property) 이라 한다.

이산시간 단위 임펄스의 이동특성(sifting property)을 아래와같이 수식으로 표현 가능함을 알고 있다.
$$x[n]=\sum_{k=-\infty}^{+\infty}x[k]\delta[n-k]$$
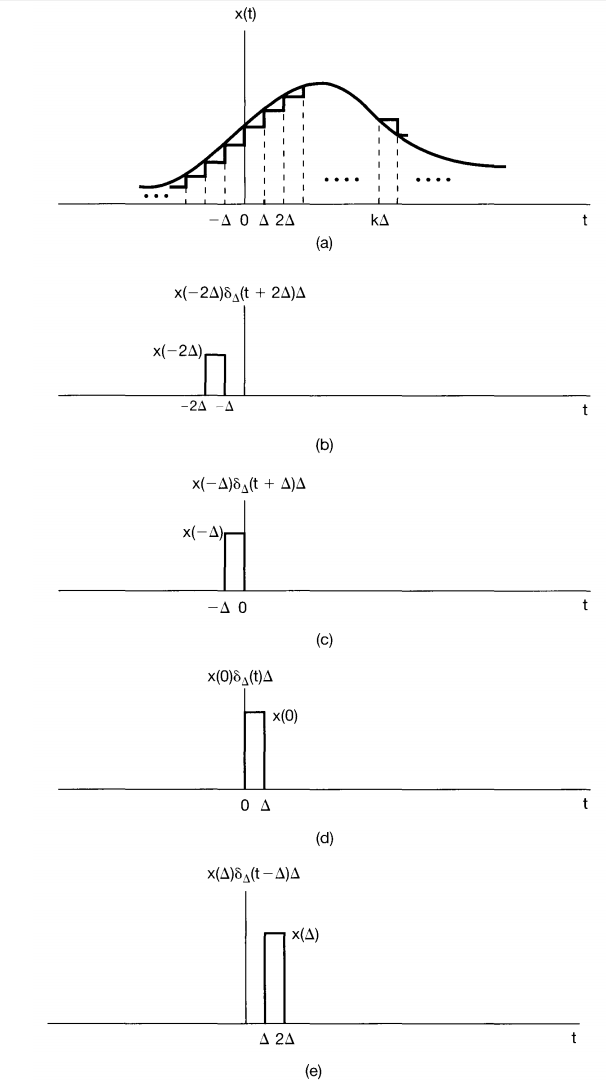
위 특성을 연속시간에 대응시키기 위해 [그림 2.12 (a)]에 나타난것 처럼 연속시간 신호 $x(t)$를 펄스 또는 계단식 근사 $\hat x(t)$ 라고 간주하고 시작해보자.
$$x(t) \approx \hat x(t)$$
그리고 이산시간 임펄스 함수는 아래와 같음을 안다.
$$\delta_\Delta(t)=\begin{cases}\dfrac{1}{\Delta}, &0 \leq t <\Delta\\ 0, &otherwise \end{cases}$$

이제 펄스신호 $\delta(t)$를 $\delta_\Delta(t)$로 치환하면 아래와 같다. 특히 $\Delta\delta_\Delta(t)$는 크기가 1이 됨을 명심하라.
$$\hat x(t)=\sum_{k=-\infty}^{+\infty}x(k\Delta)\delta_\Delta(n-k\Delta)\Delta$$
이제 $\Delta$가 0이 되도록 근사화 시키면 $\hat x(t)$는 $x(t)$에 가까워진다. 그러므로 아래의 식과 같다.
$$ x(t)=\lim_{\Delta \rightarrow 0} \sum_{k=-\infty}^{+\infty}x(k\Delta)\delta_\Delta(n-k\Delta)\Delta$$
위 식처럼 $\Delta$가 0에 근접할수록 샘플링된 신호는 원본 신호와 유사해저감을 아래그림을 통해 볼 수 있다
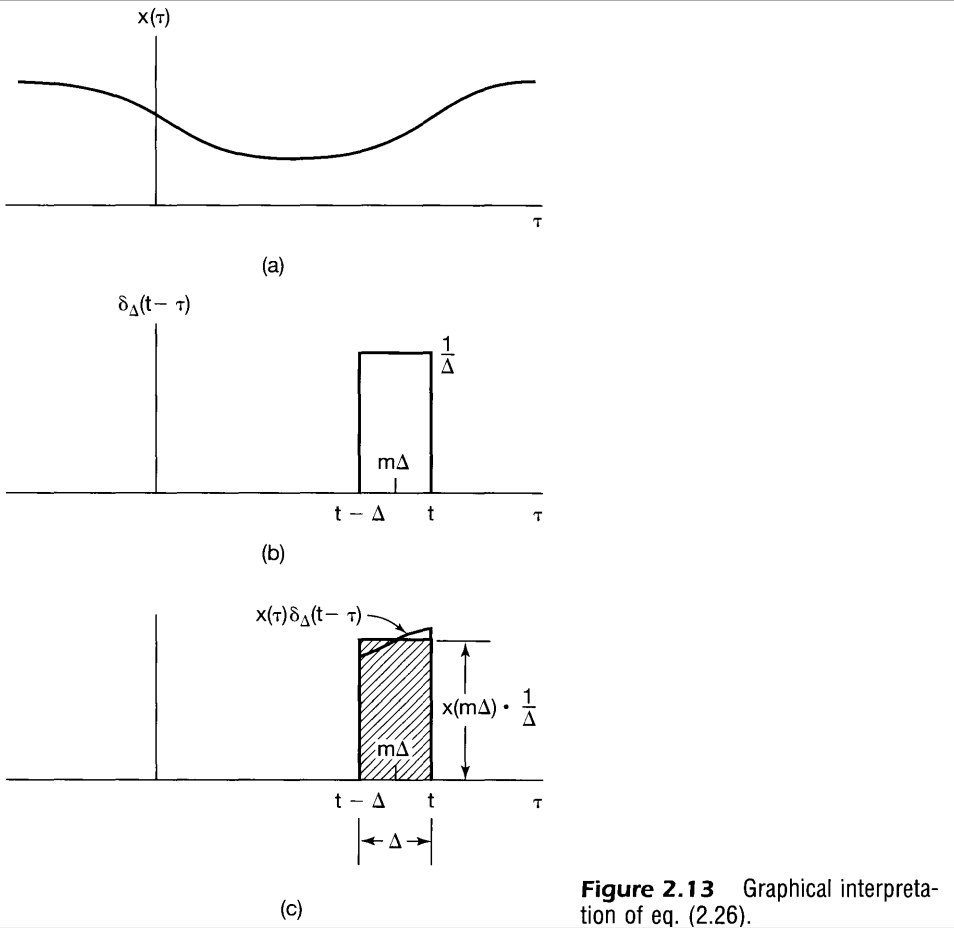
그러므로 아래와 같이 적분으로 나타낼 수 있다.
$$x(t)=\int_{-\infty}^{+\infty}x(\tau)\delta(t-\tau)d\tau$$
위 식을 연속시간 임펄스의 선별특성(sifting property) 라고 한다.
또한 임펄스의 샘플링 특성을 통해 아래의 식이 성립함을 알고있다.
$$x(t)\delta(t-\tau)=x(\tau)\delta(t-\tau)$$

그러므로 아래의 식또한 성립하게된다.
$$\int_{-\infty}^{+\infty}x(\tau)\delta(t-\tau)d\tau=\int_{-\infty}^{+\infty}x(t)\delta(t-\tau)d\tau=x(t)\int_{-\infty}^{+\infty}\delta(t-\tau)d\tau=x(t)$$
이것으로 임의의 연속시간 신호 $x(t)$를 배율(scaled)되고 이동(shifted)된 펄스들의 중첩으로 나타내는 방법을 배웠다.
2-2. 연속시간 단위 임펄스 응답과 LTI 시스템의 컨볼루션 적분 표현
(The Continuous-Time Unit Impulse Response and The Convolution Integral Representation of LTI Systems )
단위 임펄스 응답에 의한 연속시간 LTI 시스템의 표현인 컨볼루션 적분은 아래와 같다.
$$y(t)=\int_{-\infty}^{+\infty}x(\tau)h(t-\tau)d\tau$$
위 식은 아래와 같이 표현 가능하다.
$$y(t)=x(t)*h(t)$$
앞서 $\hat x(t)$를 기본적인 펄스신호 $\delta_\Delta(t)$의 배율되고 이동된 중첩의 형태가 됨을 확인하였다. 따라서 $\hat y(t)$는 $\delta_\Delta(t)$의 배율되고 이동된 형태에 대한 응답들의 중첩이 될것이다.
특히 $\hat h_{k\Delta}(t)$를 입력 $\delta_\Delta(t-k\Delta)$에 대한 LTI 시스템의 응답이라 정의한다.
그러면 연속시간 선형 시스템에 대해 아래의 식과 중첩의 원리(superposition property)에 의해
$$\hat x(t)=\sum_{k=-\infty}^{+\infty}x(k\Delta)\delta_\Delta(n-k\Delta)\Delta$$
위 식은 아래와 같이 바뀐다
$$\hat y(t)=\sum_{k=-\infty}^{+\infty}x(k\Delta) \hat h_{k\Delta}(t) \Delta$$

[그림 2.15 (a)]에서 입력 $x(t)$와 $\hat x(t)$를 표현하였다.
[그림 2.15 (b)~(d)]에서는 $x(t)$의 세가지 가중된(weighted) 펄스에 대한 시스템 응답을 보여준다.
[그림 2.15 (e)]를 통해 $\hat x(t)$에 대한 출력 $\hat y(t)$는 모든 신호들의 중첩이다.
그러면 $\Delta \rightarrow 0$과 같이 $\Delta$가 아주 작아짐에 따라 $\hat y(t)$를 $y(t)$로 근사화 시키도록 한다.
$$y(t)=\lim_{\Delta \rightarrow 0} \sum_{k=-\infty}^{+\infty}x(k\Delta) \hat h_{k\Delta}(t) \Delta$$
이제 부분합의 각 부분은 아래 그림 처럼 본래의 식과 유사해저 갑니다.

이제 식은 적분에 근접하게 되어 아래와 같이 표현 가능하다.
$$y(t)=\int_{-\infty}^{+\infty}x(\tau)h_\tau(t)d\tau$$
또한 입력 $x(t)$는 아래와 같이 표현 가능하다.
$$x(t)=\int_{-\infty}^{+\infty}x(\tau)\delta(t-\tau)d\tau$$
즉, 임펄스 $\delta(t-\tau)$에 가해진 가중이 $x(\tau) d\tau$라면, 직관적으로 $x(t)$를 가중 이동된 임펄스의 합으로 생각할 수 있다.
시스템이 선형적일 뿐만 아니라 시불변 이기까지한 LTI 시스템이라면 $h_\tau(t)=h_0(t-\tau)$이 된다. 즉, 원점에서 시간$\tau$ 만큼 이동된 단위 임펄스 $\delta(t-\tau)$에 대한 LTI 시스템의 응답은 단위 임펄스 함수$\delta(t-\tau)$에 대한 응답을 시간 이동 시킨것이다. 표현상 편의를 위해 단위 임펄스 응답을 아래첨자를 생략한 형태로 나타낸다.
$$h(t)=h_0(t)$$
즉, $h(t)$는 $\delta(t)$에 대한 응답이며 아래의 식으로 고처 쓸 수 있다.
$$y(t)=\int_{-\infty}^{+\infty}x(\tau)h(t-\tau)d\tau$$
위는 컨볼루션 적분이나 중첩 적분으로 불리며 컨볼루션 합의 연속시간 표현이고, 단위 임펄스 응답에 의한 연속시간 LTI 시스템의 표현에 해당된다.
두 신호 $x(t)$와 $h(t)$의 컨볼루션은 아래와 같은 기호로 표현된다.
$$y(t)=x(t)*h(t)$$
컨볼루션 적분을 계산하는 과정은 컨볼루션 합으로 나타내는 이산시간에서의 계산 과정과 거의 같다.








'신호 및 시스템' 카테고리의 다른 글
| 2. 특이함수 (0) | 2020.07.04 |
|---|---|
| 2. LTI 시스템의 특성 (5) | 2020.05.21 |
| 2. 선형 시불변 시스템(LTI system) - 이산시간 LTI 시스템: 컨볼루션 합(Convolution Sum) (0) | 2020.04.18 |
| 2. 선형 시불변 시스템(LTI system) - 서론 (0) | 2020.04.18 |
| 1장. 연습문제 (0) | 2020.04.17 |

