| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
- 다익스트라
- Brute Force
- binary search
- Two Points
- Dijkstra
- SQL
- Hash
- Stored Procedure
- 이진탐색
- MYSQL
- union find
- Trie
- 그래프
- two pointer
- String
- DP
- 스토어드 프로시저
- Today
- Total
codingfarm
2. LTI 시스템의 특성 본문
이산시간 및 연속시간 LTI 시스템에서의 컨볼루션 합과 적분
$$y[n]=\sum_{k=-\infty}^{+\infty}x[k]h[n-k]=x[n]*h[n]$$
$$y(t)=\int_{-\infty}^{+\infty}x(\tau)h(t-\tau)d\tau=x(t)*h(t)$$
아래 예제를 통해 비선형시스템에서의 단위 임펄스 응답은 시스템의 행동을 특징 짓지 못함을 알 수 있다.


LTI 시스템이 가지는 특성
1. 교환법칙(The Commutative Property)
$$x[n]*h[n]=h[n]*x[n]=\sum_{k=-\infty}^{+\infty}h[k]x[n-k]$$
$$x(t)*h(t)=h(t)*x(t)=\int_{-\infty}^{+\infty}h(\tau)x(t-\tau)d\tau$$
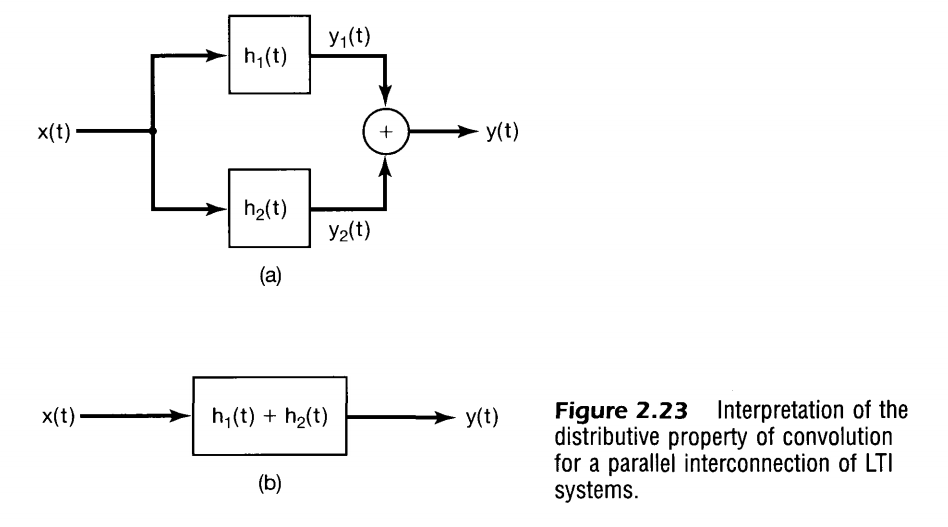
2. 분배 법칙(Distributive Property)
$$x[n]*(h_1[n]+h_2[n])=x[n]*h_1[n]+x[n]*h_2[n]$$
$$x(t)*(h_1(t)+h_2(t))=x(t)*h_1(t)+x(t)*h_2(t)$$


3. 결합법칙(Assosiative Property)
$$x[n]*(h_1[n]*h_2[n])=(x[n]*h_1[n])*h_2[n]$$
$$x(t)*(h_1(t)*h_2(t))=(x(t)*h_1(t))*h_2(t)$$
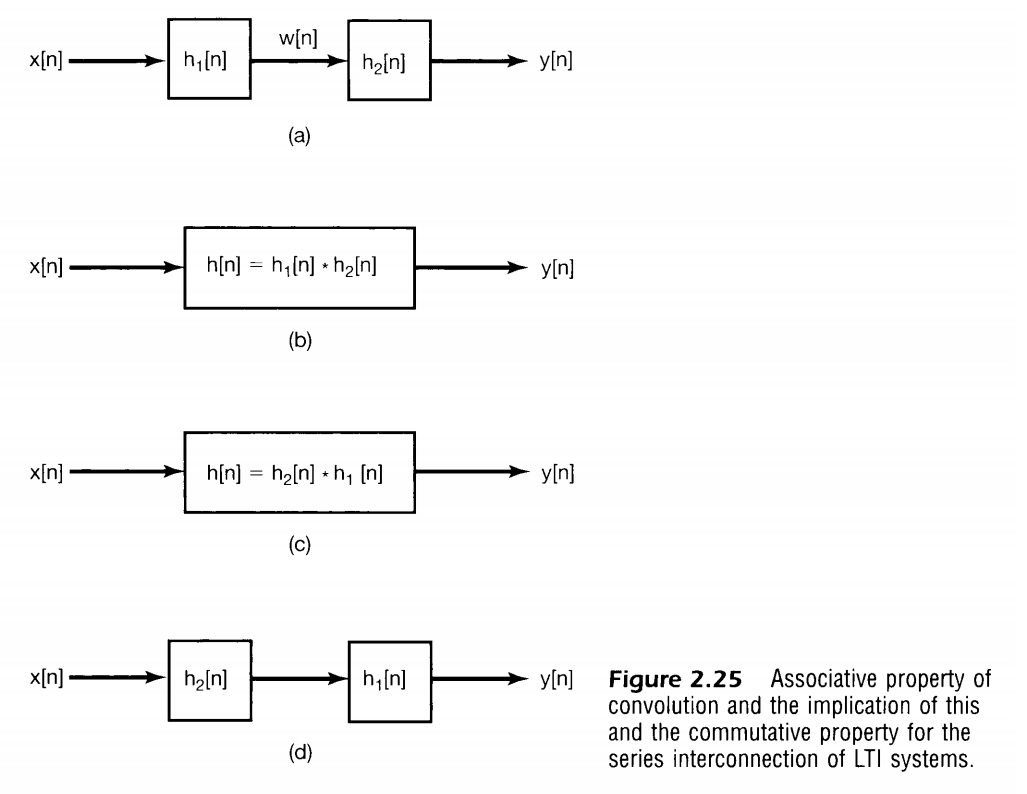
직렬로 연결된 LTI시스템들의 동작에서 신호를 컨볼루션 하는 순서는 문제 될 것 없다.
가령 2개의 비선형적인 시스템들이 직렬로 연결된 경우 순서에 따라서 결과가 변한다.

4.메모리가 있는 LTI 시스템과 메모리가 없는 LTI 시스템
시스템의 출력이 동일한 시간의 입력에만 의존한다면, 그 시스템은 메모리가 없는 시스템이다.
이산시간 LTI 시스템에 대한 컨볼루션 합은 아래와 같음을 알고 있다.
$$y[n]=\sum_{k=-\infty}^{+\infty}x[k]h[n-k]=x[n]*h[n]$$
비메모리성을 보장하기 위해선 $n \neq 0$일때 $h[n]=0$ 이어야 한다.
$$y[n]=\sum_{k=-\infty}^{+\infty}x[k]h[n-k]=x[n]h[0]$$
즉, 임펄스 응답은
$$h[n]=\sum_{k=-\infty}^{+\infty}\delta[k]h[n-k]=\delta[n]h[0]=K\delta[n]$$
$K=h[0]$은 상수이고 컨볼루션 합은 아래 관계식으로 축소된다.
$$y[n]=Kx[n]$$
만약 이산시간 LTI 시스템이 $0$이 아닌 $n$ 혹은 $t$에 대해 $0$이 아닌 임펄스응답 $h[n]$ 혹은 $h(t)$을 갖는다면, 그 시스템은 메모리를 갖는 시스템이다.
메모리를 갖지 않는 LTI 시스템의 경우
$$y[n]=Kx[n]$$
$$h[n]=K\delta[n]$$
그리고
$$y(t)=Kx(t)$$
$$h(t)=K\delta(t)$$
가 성립한다.
$K=1$일 경우 입력과 출력이 동일하고, 단위 임펄스와 단위 임펄스 응답이 서로 같다. 이 특성은 아래 식으로 표현 가능하다.
$$x[n]=x[n]*\delta[n]$$
$$x(t)=x(t)*\delta(t)$$
위 식들을 통해 단위임펄스의 특성을 표현 할 수 있다.
$$x[n]=\sum_{k=-\infty}^{+\infty}x[k]\delta[n-k]$$
$$x(t)=\int_{-\infty}^{+\infty}x(\tau)\delta(t-\tau)d\tau$$
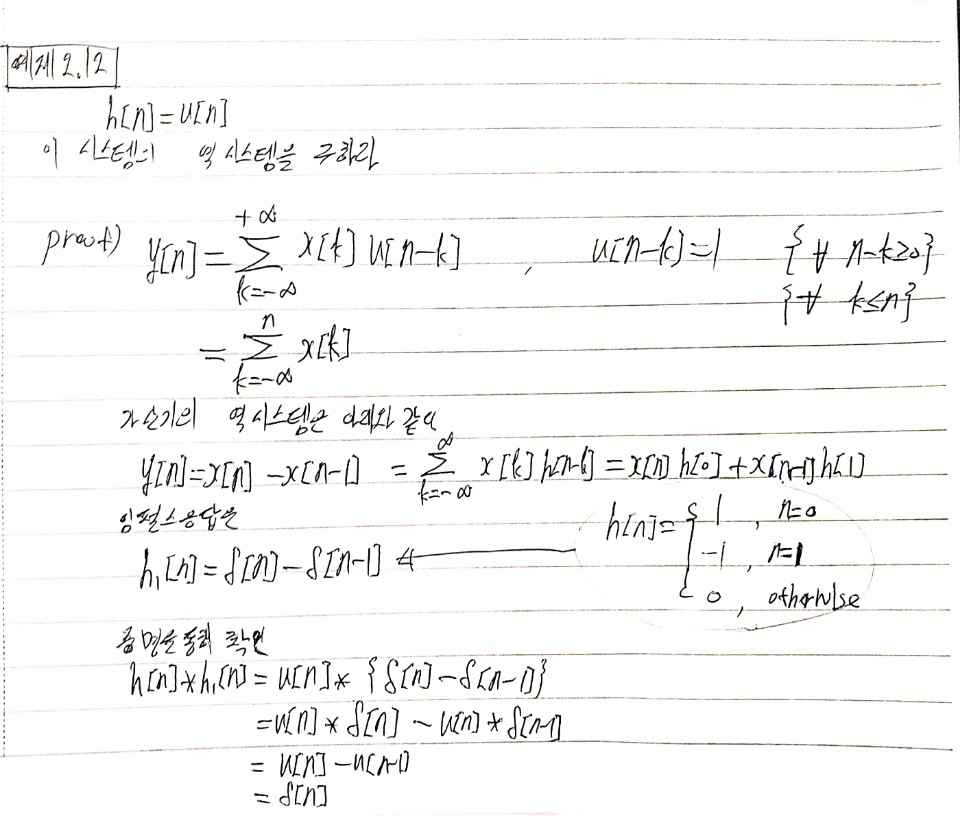
5. LTI 시스템의 가역성(Invertibility of LTI Systems)
원래의 시스템에 직렬로 연결된 하나의 역시스템(inverse system)이 존재하며, 원래의 시스템의 입력과 도일한 출력을 생산해 낸다면 이러한 시스템은 가역적이다.
LTI 시스템이 가역적이라면, 그 시스템은 LTI 역특성을 갖는다.

임펄스 응답이 $h(t)$인 시스템이 있을때 역시스템의 응답을 $h_1(t)$라 하자.
그러면
$$h(t)*h_1(t)=\delta(t)$$
$$h[n]*h_1[n]=\delta[n]$$
이 성립한다.

6. LTI 시스템에 대한 인과성 (Causality for LTI Systems)
특정 LTI 시스템이 인과적이기 위한 조건은
$h[n]=0,\;\;\;\;\;n<0$ 그리고 $h(t)=0\;\;\;\;\;t<0$ 이다.
인과성이란 출력이 입력의 현재와 과거에만 영향을 받는 성질을 말한다.
LTI 시스템이 인과적이기 위해선 $y[n]$은 $k>n$에 대해 $x[k]$의 영향을 받지 않아야 한다.
그러므로 $h[n-k]=0$ 이어야 한다.
이를 통해 인과적인 LTI 시스템의 임펄스 응답 조건은
$h[n]=0,\;\;\;\;\;n<0$ 그리고 $h(t)=0\;\;\;\;\;t<0$ 이다.
즉, 어떤 신호가 $n<0$ 혹은 $t<0$에 대해 $0$이면 인과적이다.
$$y[n]=\sum_{k=-\infty}^{n}x[k]h[n-k]=\sum_{k=0}^{\infty}h[k]x[n-k]$$
$$y(t)=\int_{-\infty}^{t}x(\tau)h(t-\tau)d\tau=\int_{0}^{\infty}h(\tau)x(t-\tau)d\tau$$
합과 적분의 구간이 0~n 그리고 0~k 임에 주목하라
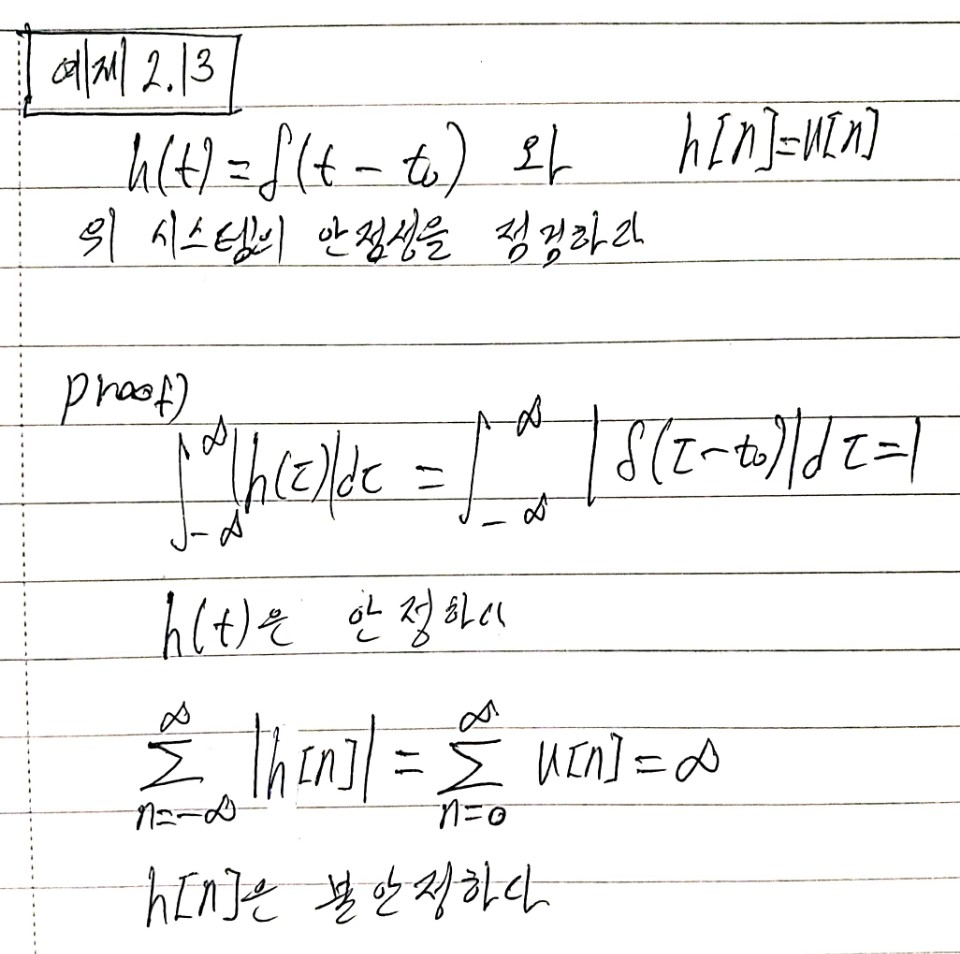
7. LTI 시스템에 대한 안정성(Stability for LTI Systems)
LTI 시스템이 안정성을 보장하기 위한 필요충분조건은 아래와 같다.
$$\sum_{k=-\infty}^{+\infty}|h[k]| < \infty$$
$$\int_{-\infty}^{+\infty}|h(\tau)|d\tau<\infty$$
안전성이란 모든 제한된 입력이 제한된 출력을 야기하는 성질이다.
입력 $x[n]$이 아래와 같이 제한되어 있다.
$|x[n]|<B,\;\;\;\; all\;of\;n$
이 입력을 단위 임펄스 응답이 $h[n]$인 이산시간 LTI 시스템에 가하면
$$\begin{align*}
|y[n]| &=\left| \sum_{k=-\infty}^{+\infty}h[k]x[n-k] \right|\\
&\leq \sum_{k=-\infty}^{+\infty}|h[k]||x[n-k]|\\
&\leq B\sum_{K=-\infty}^{+\infty}|x[n-k]|
\end{align*}$$
위 식에서 $\sum_{k=-\infty}^{+\infty}|h[k]| < \infty$ 이면 $y[n]$의 크기 또한 유한하므로 시스템이 아정하다 볼 수있다.
연속시간 LTI 시스템의 경우
$$\begin{align*}
|y(t)|&=\left|\int_{-\infty}^{+\infty}h(\tau)x(t-\tau)d\tau \right|\\
&\leq\int_{-\infty}^{+\infty}|h(\tau)||x(t-\tau)|d\tau\\
&\leq B\int_{-\infty}^{+\infty}|h(\tau)|d\tau
\end{align*}$$
만약 $\int_{-\infty}^{+\infty}|h(\tau)|d\tau<\infty$ 이면 임펄스 응답의 적분이 가능하므로 시스템은 안정하다.
8. LTI 시스템의 단위 계단 응답(Unit Step Response of LTI System)
$s[n]$과 $s(t)$는 단위 계단 입력에 대한 LTI 시스템의 출력이다.
$$s[n]=\sum_{k=-\infty}^{n}h[k]=h[n]*u[n]$$
$$h[n]=s[n]-s[n-1]$$
$$s(t)=\int_{-\infty}^{t}h(\tau)d\tau$$
$$h(t)=\frac{ds(t)}{dt}=s'(t)$$

단위 계단 응답은 임펄스 응답과 더불어 LTI 시스템의 동작을 설명하기 위해 쓰인다.
$\displaystyle s[n]=u[n]*h[n] = \sum_{k=-\infty}^{\infty}h[k]u[n-k]$
$\displaystyle \begin{align*}
u[n-k]=1 \;\;\;\;\;\;\;&\{\forall\;n-k \geq0 \}\\
&\{\forall \; k \leq n\}
\end{align*}$
$\displaystyle s[n]=\sum_{k=-\infty}^{n}h[k]$
위식을 만족하는 $h[n]$에 대한 식은 아래와 같다.
$h[n]=s[n]-s[n-1]$
즉, 이산시간 LTI 시스템의 계단응답은 임펄스응답의 연속적인 합이다.
임펄스 응답은 계단응답의 일차차분이다.
'신호 및 시스템' 카테고리의 다른 글
| 2. 특이함수 (0) | 2020.07.04 |
|---|---|
| 2. 선형 시불변 시스템(LTI system) - 연속시간 LTI 시스템 : 컨볼루션 적분(Convolution Integral) (0) | 2020.04.19 |
| 2. 선형 시불변 시스템(LTI system) - 이산시간 LTI 시스템: 컨볼루션 합(Convolution Sum) (0) | 2020.04.18 |
| 2. 선형 시불변 시스템(LTI system) - 서론 (0) | 2020.04.18 |
| 1장. 연습문제 (0) | 2020.04.17 |

